

[產品介紹]
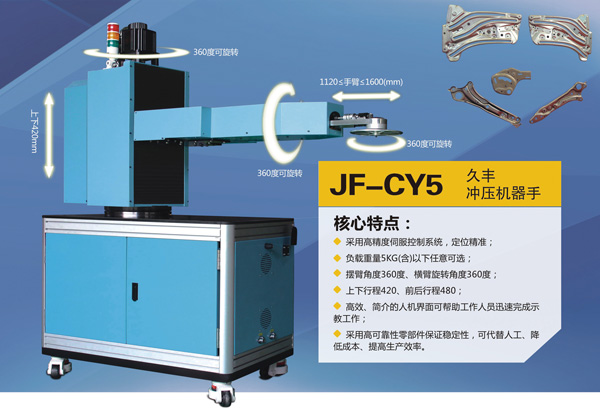
該款沖壓機器人高度自動化,操作界面簡單、方便使用。
該款機器人在算法上使用關節空間軌跡規劃;在設計階段會使用統一的消息編解碼,解決消息流通過程中解碼的一致性。在每個系統內部和外部定義完整的接口訪問機制,以實現各個系統無障礙訪問;采用模塊劃分的方式,將控制系統層層分解,同時增加了散熱系統,保證控制柜內溫度在額定范圍以內;在每一塊控制板卡上增加屏蔽罩,以降低硬件板卡的電磁干擾,提高系統可靠性。
[技術參數]
|
項目 Project |
規格 Specifications |
|
|
型號 Model |
JF-CY5 |
|
|
驅動方式 Driving mode |
伺服 Servo |
|
|
重復定位精度 Repeat positioning accuracy |
±0.1mm |
|
|
自由度 Freedom |
5 |
|
|
手腕部可搬運重量 Wrist can carry weight |
5-10kg |
|
|
可達半徑 Reach radius |
1600mm |
|
|
節拍 Rhythm |
500-1000次/小時500-1000times per hour |
|
|
本體重量 Body weight |
500kg |
|
|
安裝方式 Installation method |
地面安裝 Ground installation |
|
|
動作范圍 |
J1 |
±360° |
|
J2 |
上下420mm |
|
|
J3 |
±180 |
|
|
J4 |
前后480mm |
|
|
J5 |
±360 |
|
|
最高速度 |
J1 |
180°/S |
|
J2 |
1000mm/S |
|
|
J3 |
540°/S |
|
|
J4 |
1000mm/S |
|
|
J5 |
450°/S |
|



